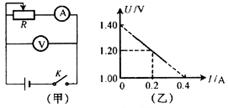
为提高金属丝电阻的测量精确度,减少误差,实验中需要确定电流表的内接或外接,由于电表内阻不清楚,一同学采用了试触法进行判断,将图示电路闭合后,电压表移动端接到a点,电压表示数为2.0V,电流表示数为0.40A,当移动端接到b点时,电压表示数为3.0V,电流表示数为0.38A(电源内阻不计),由以上数据可知,应采用电流表______接法,RX的测量值是________ 。(保留两位有效数字)
。(保留两位有效数字)
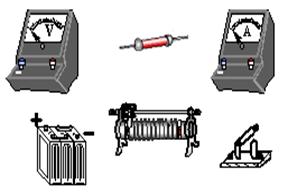
(7分)有一个阻值在100Ω~200Ω之间的未知电阻Rx,额定功率为0.25W,现在用伏安法准确测量它的阻值,备有以下器材:
A.量程0~50 mA、内阻为20Ω电流表A1;
B.量程0~3A、内阻为0.01Ω电流表A2;
C.量程0~5V、内阻为10KΩ的电压表V1;
D.量程0~15V、内阻为20KΩ的电压表V2;
E.0~20Ω、允许电流2A的变阻器R;
F.电动势12 V 、内阻为0.1Ω的直流电源E;
G.导线若干、开关适量。
(1)实验中电压表应选。电流表应选。
(2)为在较大范围内多测量几次电压和电流值并减小误差,请在虚方框中画出实验电路图,并用画线表示导线连接好实物图。
(3)闭会开关S前,变阻器的滑片应在。
在探究加速度与物体所受合外力和质量间的关系时,采用如图所示的实验装置,小车及车中的砝码质量用M表示,盘及盘中的砝码质量用m表示,小车的加速度可由小车后拖动的纸带由打点计数器打上的点计算出: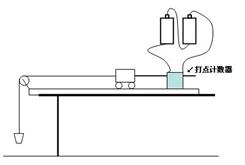
⑴某学生将实验装置如上图安装好,准备接通电源后开始做实验,但他的装置图中有两个明显的错误:
①
②
⑵M与m的大小关系满足 时,可以认为绳子对小车拉力的大小等于盘和砝码的重力。
⑶一组同学保持盘及盘中的砝码质量一定,探究物体加速度与质量的关系,以下做法错误的是()
A.平衡摩擦力时,应将盘及盘中的砝码用细绳通过定滑轮系在小车上
B.每次改变小车的质量时,不需要重新平衡摩擦力
C.实验时,先放开小车,再接通打点计时器电源
D.小车运动的加速度,可用天平称出盘及砝码质量m、小车质量M,用a=mg/M求出
⑷在保持小车及车中的砝码质量质量M一定,探究加速度与所受合外力的关系时,由于平衡摩擦力时操作不当,二位同学得到的a―F关系分别如下图A、B所示(a是小车的加速度,F是细线作用于小车的拉力)。其原因分别是: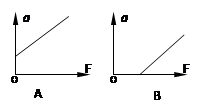
A图:
B图:
用一测力计水平拉一端固定的弹簧,以此测定该弹簧的劲度系数k,测出弹簧秤示数F与弹簧长度L的数据如下表所示:
| F/N |
1.1 |
1.5 |
2.0 |
3.0 |
3.5 |
3.8 |
4.0 |
| L/cm |
22.00 |
22.35 |
22.70 |
23.31 |
23.65 |
23.80 |
24.00 |
请完成以下两小题:
⑴在右图中作出此弹簧的F-L图.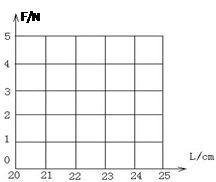
⑵图线与L轴的交点表示,其值为cm,此弹簧的劲度系数为N/m.

 粤公网安备 44130202000953号
粤公网安备 44130202000953号