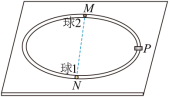
如图所示,桌面上固定有一半径为R的水平光滑圆轨道,M、N为轨道上的两点,且位于同一直径上,P为MN段的中点。在P点处有一加速器(大小可忽略),小球每次经过P点后,其速度大小都增加 。质量为m的小球1从N处以初速度 沿轨道逆时针运动,与静止在M处的小球2发生第一次弹性碰撞,碰后瞬间两球速度大小相等。忽略每次碰撞时间。求:
(1)球1第一次经过P点后瞬间向心力的大小;
(2)球2的质量;
(3)两球从第一次碰撞到第二次碰撞所用时间。
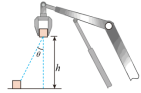
机械臂广泛应用于机械装配。若某质量为m的工件(视为质点)被机械臂抓取后,在竖直平面内由静止开始斜向上做加速度大小为a的匀加速直线运动,运动方向与竖直方向夹角为θ,提升高度为h,如图所示。求:
(1)提升高度为h时,工件的速度大小;
(2)在此过程中,工件运动的时间及合力对工件做的功。
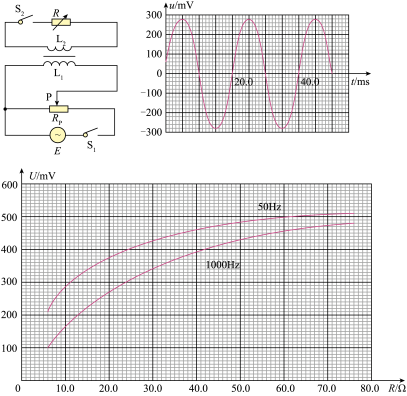
一兴趣小组拟研究某变压器的输入和输出电压之比,以及交流电频率对输出电压的影响。题图1为实验电路图,其中 和 为变压器的原、副线圈, 和 为开关,P为滑动变阻器 的滑片,R为电阻箱,E为正弦式交流电源(能输出电压峰值不变、频率可调的交流电)。
(1)闭合 ,用多用电表交流电压挡测量线圈 两端的电压。滑片P向右滑动后,与滑动前相比,电表的示数_______(选填 “变大”“不变”“ 变小”)。
(2)保持 断开状态,调整E输出的交流电频率为50 Hz,滑动滑片P,用多用电表交流电压挡测得线圈 两端的电压为2500 mV时,用示波器测得线圈 两端电压u随时间t的变化曲线如图所示,则线圈 两端与 两端的电压比值为_______(保留3位有效数字)。
(3)闭合 ,滑动P到某一位置并保持不变。分别在E输出的交流电频率为50 Hz、1000 Hz的条件下,改变R的阻值,用多用电表交流电压挡测量线圈 两端的电压U,得到U-R关系曲线如图3所示。用一个阻值恒为20 Ω的负载 替换电阻箱R,由图可知,当频率为1000 Hz时, 两端的电压为_______mV;当频率为50 Hz时,为保持 两端的电压不变,需要将 与一个阻值为_______Ω的电阻串联。(均保留3位有效数字)
某实验小组用单摆测量重力加速度。所用实验器材有摆球、长度可调的轻质摆线、刻度尺、50分度的游标卡尺、摄像装置等。

(1)用游标卡尺测量摆球直径d。当 并拢时,游标尺和主尺的零刻度线对齐。放置摆球后游标卡尺示数如图甲所示,则摆球的直径d为________mm。
(2)用摆线和摆球组成单摆,如图乙所示。当摆线长度l=990.1mm时,记录并分析单摆的振动视频,得到单摆的振动周期T=2.00 s,由此算得重力加速度g为_____ (保留3位有效数字)。
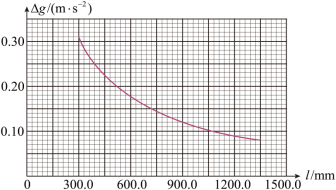
(3)改变摆线长度l,记录并分析单摆的振动视频,得到相应的振动周期。他们发现,分别用l和 作为摆长,这两种计算方法得到的重力加速度数值的差异大小 随摆线长度l的变化曲线如图所示。由图可知,该实验中,随着摆线长度l的增加, 的变化特点是____________,原因是____________。
某卫星绕地心的运动视为匀速圆周运动,其周期为地球自转周期T的 ,运行的轨道与地球赤道不共面(如图)。 时刻,卫星恰好经过地球赤道上P点正上方。地球的质量为M,半径为R,引力常量为G。则( )
A. 卫星距地面的高度为
B. 卫星与位于P点处物体的向心加速度大小比值为
C. 从 时刻到下一次卫星经过P点正上方时,卫星绕地心转过的角度为
D. 每次经最短时间实现卫星距P点最近到最远的行程,卫星绕地心转过的角度比地球的多
一列简谐横波在介质中沿x轴传播,波速为 , 时的波形图如图所示,P为该介质中的一质点。则( )
| A. |
该波的波长为14m |
| B. |
该波的周期为8s |
| C. |
t=0时质点P的加速度方向沿y轴负方向 |
| D. |
s内质点P运动的路程有可能小于0.1m |
某实验小组测得在竖直方向飞行的无人机飞行高度y随时间t的变化曲线如图所示,E、F、M、N为曲线上的点,EF、MN段可视为两段直线,其方程分别为 和 。无人机及其载物的总质量为2kg,取竖直向上为正方向。则( )
| A. |
EF段无人机的速度大小为4m/s |
| B. |
FM段无人机的货物处于失重状态 |
| C. |
FN段无人机和装载物总动量变化量大小为 |
| D. |
MN段无人机机械能守恒 |
如图所示,与水平面夹角为 的绝缘斜面上固定有光滑U型金属导轨。质量为m、电阻不可忽略的导体杆MN沿导轨向下运动,以大小为v的速度进入方向垂直于导轨平面向下的匀强磁场区域,在磁场中运动一段时间t后,速度大小变为2v。运动过程中杆与导轨垂直并接触良好,导轨的电阻忽略不计,重力加速度为g。杆在磁场中运动的此段时间内( )
| A. |
流过杆的感应电流方向从N到M |
| B. |
杆沿轨道下滑的距离为 |
| C. |
流过杆感应电流的平均电功率等于重力的平均功率 |
| D. |
杆所受安培力的冲量大小为 |
原子核 可以经过多次 和 衰变成为稳定的原子核 ,在该过程中,可能发生的 衰变是( )
| A. |
|
B. |
|
| C. |
|
D. |
|
某实验小组利用双缝干涉实验装置分别观察a、b两单色光的干涉条纹,发现在相同的条件下光屏上a光相邻两亮条纹的间距比b光的小。他们又将a、b光以相同的入射角由水斜射入空气,发现a光的折射角比b光的大,则( )
| A. |
在空气中传播时,a光的波长比b光的大 |
| B. |
在水中传播时,a光的速度比b光的大 |
| C. |
在水中传播时,a光的频率比b光的小 |
| D. |
由水射向空气时,a光的全反射临界角比b光的小 |
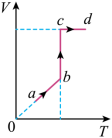
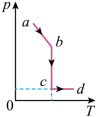
密封于气缸中的理想气体,从状态 依次经过ab、bc和cd三个热力学过程达到状态d。若该气体的体积V随热力学温度T变化的 图像如图所示,则对应的气体压强p随T变化的 图像正确的是( )
| A. |
|
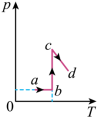
B. |
|
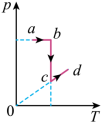
C. |
|
D. |
|
真空中固定有两个点电荷,负电荷 位于坐标原点处,正电荷 位于 轴上, 的电荷量大小为 的8倍。若这两点电荷在 轴正半轴的 处产生的合电场强度为0,则 、 相距( )
| A. |
|
B. |
|
C. |
|
D. |
|
某小组设计了一种呼吸监测方案:在人身上缠绕弹性金属线圈,观察人呼吸时处于匀强磁场中的线圈面积变化产生的电压,了解人的呼吸状况。如图所示,线圈P的匝数为N,磁场的磁感应强度大小为B,方向与线圈轴线的夹角为 。若某次吸气时,在t时间内每匝线圈面积增加了S,则线圈P在该时间内的平均感应电动势为( )
| A. |
|
B. |
|
| C. |
|
D. |
|
矫正牙齿时,可用牵引线对牙施加力的作用。若某颗牙齿受到牵引线的两个作用力大小均为F,夹角为 (如图),则该牙所受两牵引力的合力大小为( )
| A. |
|
B. |
|
C. |
|
D. |
|
秋千由踏板和绳构成,人在秋千上的摆动过程可以简化为单摆的摆动,等效“摆球”的质量为 ,人蹲在踏板上时摆长为 ,人站立时摆长为 。不计空气阻力,重力加速度大小为 。
(1)如果摆长为 ,“摆球”通过最低点时的速度为 ,求此时“摆球”受到拉力 的大小。
(2)在没有别人帮助的情况下,人可以通过在低处站起、在高处蹲下的方式使“摆球”摆得越来越高。
a.人蹲在踏板上从最大摆角 开始运动,到最低点时突然站起,此后保持站立姿势摆到另一边的最大摆角为 。假定人在最低点站起前后“摆球”摆动速度大小不变,通过计算证明 。
b.实际上人在最低点快速站起后“摆球”摆动速度的大小会增大。随着摆动越来越高,达到某个最大摆角 后,如果再次经过最低点时,通过一次站起并保持站立姿势就能实现在竖直平面内做完整的圆周运动,求在最低点“摆球”增加的动能 应满足的条件。

 粤公网安备 44130202000953号
粤公网安备 44130202000953号