在“探究杠杆的平衡条件”的实验中,小明发现在没有挂物体时,杠杆处于如甲图所示的状态,他应将杠杆两端的平衡螺母向 (选填“左”或“右”)调节,使杠杆在水平位置平衡,挂上重力均为0.5N的钩码后,再次平衡时如乙图所示,小明得出了杠杆的平衡条件是“动力×动力臂=阻力×阻力臂”,小明得出结论的过程中存在的不妥之处是 ;如丙图所示,把乙图a点的钩码取下,换用弹簧测力计使杠杆再次平衡时,发现其示数大于0.5N,根本原因(直接观察到的不属于根本原因)是 ;采用丁图的装置进行探究,发现当杠杆水平平衡时,与其他同学得出的结论不相同,其主要原因是 。

在探究“滑动摩擦力的大小与哪些因素有关”的实验中。
(1)小明的三次实验情况分别如图20中的甲、乙、丙所示。实验时,用弹簧测力计拉木块在水平木板(或毛巾)上做匀速直线运动,根据______知识可知,这时滑动摩擦力的大小等于弹簧测力计的示数。
(2)小明在探究“滑动摩擦力的大小与压力的关系”时,利用图20中甲、乙两组数据比较得出:“压力越大,滑动摩擦力就越大”的结论。你认为他这样对比这两组数据就得出这样的结论对吗?______。你的理由是:___________。
(3)请你根据小明这三次实验情况设计一个实验数据记录表格,并填写相关内容
(4)从图20中甲、丙两组数据比较,你能得出的结论是:_______________
某物理研究学习小组在探究物体所受重力大小与物体质量关系时,实验记录如下表:
| 物体 |
物体质量m/kg |
重力G/N |
比值G/m(N/kg) |
比值G/m的平均值(N/kg) |
| 物体1 |
0.1 |
1.0 |
10 |
|
| 物体2 |
0.2 |
2.1 |
10.1 |
|
| 物体3 |
0.3 |
2.9 |
9.7 |
|
| 物体4 |
0.4 |
4.0 |
10 |
|
| 物体5 |
0.5 |
5.0 |
10 |
|
| 物体6 |
0.6 |
6.0 |
10 |

(1)在探究过程中,需要的测量工具有、
(2)在上表空白处填上比值G/m的平均值
(3)根据表中数据,在图19中画出G—m的图像。
(4)分析表中实验数据及图像,得出的结论是
小强同学在做“用天平和量筒测盐水密度”的实验。
(1)请完成以下实验要求。
a.用天平称出空烧杯的质量m1=63g;
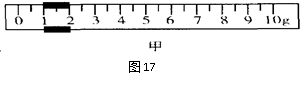
b.往空烧杯中加入适量盐水,用天平称烧坏和盐水的总质量。天平平衡后,右盘中砝码的总质量是140g,游码位置如图17所示。则盐水和烧杯的总质量m2=_________g;
c.把烧杯中的盐水全部倒入量筒中,如图18所示。则盐水的体积V=________cm3。
d.测出的盐水密度ρ=_________g/cm3。
(2)按上面的实验方案进行实验,会使测出的盐水密度有误差。
①是什么原因导致测出的盐水密度有误差?
②通过分析来说明测出的盐水密度是偏大还是偏小?
在“探究凸透镜成像的规律”的实验中。
(1) 如图18,要使像能够成在光屏的中央,应将光屏向调,使它的中心和烛焰、的中心在 上;
(2)实验过程中,当烛焰距凸透镜20cm时,移动光屏至某一位置,在光屏上得到一等大清晰的像,则该凸透镜的焦距是cm;
(3)接着使烛焰向左移动5cm,此时应该将光屏向 移到某一位置(选填“左”或“右”),才能在屏上得到、、像。
(4)如果将透镜的下半部分遮住,光屏上的像将会。
(5)从蜡烛到凸透镜距离等于2倍焦距处开始,向焦点方向移动蜡烛,在这过程中,像到透镜的距离________________ (填“增大”“减小”“不变”)。
(6)如果他在实验时,无论怎样移动光屏都找不到清晰的像,可能的原因是
。
(7)小华看到装满清水的透明玻璃酒杯很像一个凸透镜(如图13),就想探究它是否具有凸透镜的特点.请你帮他想出一个验证的方法.
在 “研究平面镜成像特点” 的实验中(如图9):
(1)李洋同学用玻璃板取代平面镜是为了,在玻璃板的前面放一支点燃的蜡烛A,还要在玻璃板的后面放一支没有点燃的蜡烛B,对蜡烛A和B的要求是 ,
这是为了比较 。
(2)如果物体逐渐远离平面镜时,像
(填“变大”“变小”或“不变”)
(3)实验中还需要用刻度尺比较 。如右图是该同学在白纸上留下的实验记录,能否得出“像和物到镜面的距离相等”的结论?为什么?
(4)该同学通过玻璃板看到了同一个蜡烛的两个像,产生这种现象的原因是 。
(5)如果在实验时,李洋无论怎样调节后面的蜡烛,都无法与蜡烛的像重合,你认为可能的原因是 。
(6)后来,他又用跳棋子代替点燃的蜡烛重新实验,但看不清跳棋的像.请你帮他想个办法看清棋子的像: .
 粤公网安备 44130202000953号
粤公网安备 44130202000953号