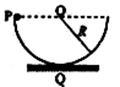
如图,一半径为R的半圆形轨道竖直固定放置,轨道两端等高。质量为m的质点自轨道端点 P由静止开始滑下,滑到最低点Q时,对轨道的正压力为2mg,重力加速度大小为g,质点自P滑到Q的过程中,克服摩擦力所做的功为( )
A. |
B. |
C. |
D. |
相关试题
质点做简谐运动,下列说法正确的是()
| A.它受到的合外力始终不为零 |
| B.速度方向总是跟位移方向相反 |
| C.加速度的方向始终和位移方向相反 |
| D.简谐运动是匀变速运动 |
“研究平抛物体的运动”实验的装置如图所示,在实验前应( )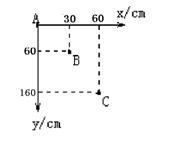
| A.将斜槽的末端切线调成水平 |
| B.将木板校准到竖直方向,并使木板平面与小球下落的竖直平面平行 |
| C.小球每次必须从斜面上同一位置由静止开始释放 |
| D.在白纸上记录斜槽末端槽口的位置O,作为小球做平抛运动的起点和所建坐标系的原点 |
m为在水平传送带上被传送的小物体(可视为质点), A为终端皮带轮,如图所示,已知皮带轮半径为r,传送带与皮带轮间不会打滑.当m可被水平抛出时.A 轮每秒的转数最少是( )
A. |
B. |
C. |
D. |
如右图所示是用以说明向心力和质量、半径之间关系的仪器,球p和q可以在光滑水平杆上无摩擦地滑动,两球之间用一条轻绳连接,mp=2mq,当整个装置绕中心轴以角速度ω匀速旋转时,两球离转轴的距离保持不变,则此时( )
| A.两球均受到重力、支持力、拉力和向心力四个力的作用 | ||
| B.p球受到的向心力大于q球受到的向心力 |
C.rp一定等于rq/ 2 |
D.当ω增大时,p球将向 外运动 外运动 |
 ,则它们的周期之比T1∶T2角速度之比
,则它们的周期之比T1∶T2角速度之比 ∶
∶ 2 分别是( )
2 分别是( ) 粤公网安备 44130202000953号
粤公网安备 44130202000953号