如图所示,电动势为E、内阻为r的电池与定值电阻R0、滑动变阻器R串联,已知R0=r,滑动变阻器的最大阻值是2r.当滑动变阻器的滑片P由a端向b端滑动时,下列说法中正确的是( )
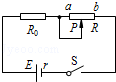
| A.电路中的电流变大 |
| B.电源的输出功率先变大后变小 |
| C.滑动变阻器消耗的功率变小 |
| D.定值电阻R0上消耗的功率先变大后变小 |
相关试题
如图15-14所示,一束白光通过玻璃棱镜发生色散现象,下列说法正确的是( )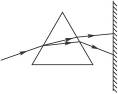
图15-14
| A.红光的偏折最大,紫光的偏折最小 | B.红光的偏折最小,紫光的偏折最大 |
| C.玻璃对红光的折射率比紫光大 | D.玻璃中紫光的传播速度比红光大 |
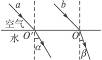
)如图15-12所示,只含黄光和紫光的复色光束PO,沿半径方向射入空气中的玻璃半圆柱后,被分成两束光OA和OB沿如图所示方向射出.则( )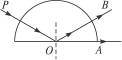
图15-12
| A.OA为黄光,OB为紫光 | B.OA为紫光,OB为黄光 |
| C.OA为黄光,OB为复色光 | D.OA为紫光,OB为复色光 |
已知一束可见光a是由m、n、p三种单色光组成的.检测发现三种单色光中,n、p两种色光的频率都大于m色光;n色光能使某金属发生光电效应,而p色光不能使该金属发生光电效应.那么,图15-11中光束a通过三棱镜的情况是( )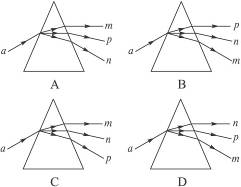
图15-11
两种单色光由水中射向空气时发生全反射的临界角分别为θ1、θ2,已知θ1>θ2.用n1、n2分别表示水对两单色光的折射率,v1、v2分别表示两单色光在水中的传播速度,则()
| A.n1<n2,v1<v2 | B.n1<n2,v1>v2 | C.n1>n2,v1<v2 | D.n1>n2,v1>v2 |
 粤公网安备 44130202000953号
粤公网安备 44130202000953号