“嫦娥三号”月球探测器与“嫦娥一号”和“嫦娥二号”绕月飞行不同,“嫦娥三号”实现了落月目标。“嫦娥三号”发射升空后,着陆器携带巡视器,经过奔月、环月最后着陆于月球表面,由巡视器(月球车)进行巡视探测。假设月球的半径为R,月球表面的重力加速度为地球表面重力加速度的 ,“嫦娥三号”月球探测器的总质量为m,地球表面的重力加速度为g,“环月”运动过程可近似为匀速圆周运动,那么在“环月”运动过程中它的动能可能为( )
,“嫦娥三号”月球探测器的总质量为m,地球表面的重力加速度为g,“环月”运动过程可近似为匀速圆周运动,那么在“环月”运动过程中它的动能可能为( )
A. |
B. |
C. |
D. |
相关试题
中国科学家发现了量子反常霍尔效应,杨振宁称这一发现是诺贝尔奖级.如图所示,厚度为h,宽度为d的金属导体,当磁场方向与电流方向(自由电子定向移动形成电流)垂直时在上下表面会产生电势差,这种现象称为霍尔效应.下列说法正确的是( )
| A.上表面的电势高于下表面 |
| B.下表面的电势高于上表面 |
| C.增大h时,上下表面的电势差增大 |
| D.增大d时,上下表面的电势差增大 |
两个相同的圆形线圈,通以方向相同但大小不同的电流I1和I2,如图所示。先将两个线圈固定在光滑绝缘杆上,问释放后它们的运动情况是() 
| A.相互吸引,电流大的加速度大 |
| B.相互吸引,加速度大小相等 |
| C.相互排斥,电流大的加速度大 |
| D.相互排斥,加速度大小相等 |
如图所示,在加有匀强磁场的区域中,一垂直于磁场方向射入的带电粒子轨迹如图所示,由于带电粒子与沿途的气体分子发生碰撞,带电粒子的动能逐渐减小,则下列说法中正确的是()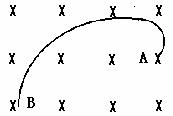
| A.带电粒子带正电,是从B点射入的 |
| B.带电粒子带负电,是从B点射入的 |
| C.带电粒子带负电,是从A点射入的 |
| D.带电粒子带正电,是从A点射入的 |
如图所示,三根长直通电导线中的电流大小相同,通过b、d导线的电流方向为垂直纸面向里,c导线的电流方向为垂直纸面向外,a点为b、d两点连线的中点,ac垂直bd,且ab=ad=ac,则a点的磁场方向为()
| A.垂直纸面向外 | B.垂直纸面向里 |
| C.沿纸面由a指向b | D.沿纸面由a指向d |

 粤公网安备 44130202000953号
粤公网安备 44130202000953号