2011年7月在土耳其伊斯坦布尔举行的第15届机器人世界杯赛上。中国科大“蓝鹰”队获得仿真2D组冠军和服务机器人组亚军。改写了我国服务机器人从未进人世界前5的纪录.标志着我国在该领域的研究取得了重要进展。图中是科大著名服务机器人“可佳”,如图所示。现要执行一项任务,给它设定了运动程序。图甲所示为“可佳”做直线运动的v-t图像.若将“可佳”的运动过程用x-t图像表示出来(其中x为物体相对出发点的位移),则图乙中的四幅图描述正确的是( )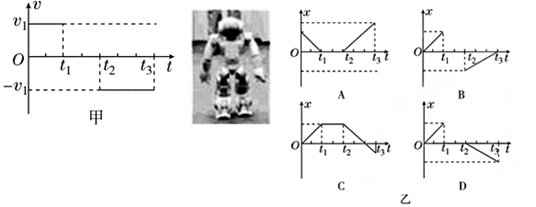
相关试题
用遥控器调换电视机的频道的过程,实际上就是传感器把光信号转化为电信号的过程。下列属于这类传感器的是( )
| A.红外报警装置 | B.走廊照明灯的声控开关 |
| C.自动洗衣机中的压力传感装置 | D.电饭煲中控制加热和保温的温控器 |
如图所示,将一线圈放在一匀强磁场中,线圈平面平行于磁感线,则线圈中有感应电流产生的是( )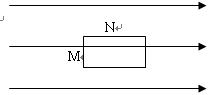
| A.当线圈绕N边转动 |
| B.当线圈绕M边转动 |
| C.当线圈做垂直于磁感线的平行运动 |
D. 当线圈做平行于磁感线的运动 当线圈做平行于磁感线的运动 |
 粤公网安备 44130202000953号
粤公网安备 44130202000953号