霍尔式位移传感器的测量原理如图所示,有一个沿z轴方向均匀变化的匀强磁场,磁感应强度B=B0+kz(B0、k均为常数)。将霍尔元件固定在物体上,保持通过霍尔元件的电流I不变(方向如图所示),当物体沿z轴正方向平移时,由于位置不同,霍尔元件在y轴方向的上、下表面的电势差U也不同。则( )
| A.磁感应强度B越大,上、下表面的电势差U越大 |
B.k越大,传感器灵敏度( )越高 )越高 |
| C.若图中霍尔元件是电子导电,则下板电势高 |
| D.电流,越大,上、下表面的电势差U越小 |
相关试题
如图所示,重4N的物体A,被平行于斜面的细线栓在斜面的上端,整个装置保持静止状态,倾角为30°的斜面被固定在测力计上,物块与斜面间无摩擦,装置稳定后,当细线被烧断物块正在下滑时与静止时比较,测力计的示数( )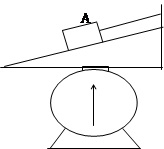
| A.增加4N | B.减少3N | C.减少1N | D.不变 |
如图所示,物体A、B经无摩擦的定滑轮用细线连在一起, A物体受水平向右的力F的作用,此时B匀速下降,A水平向左运动,由此可知( ) 
A、物体A做匀速运动 B、A做加速运动
C、物体A所受摩擦力逐渐增大 D、物体A所受摩擦力逐渐减小
如图所示,带支架的平板小车沿水平面向左做直线运动,小球A用细线悬挂于支架前端,质量为m的物块B始终相对于小车静止地摆放在右端。B与小车接触面间的动摩擦因数为μ。.若某时刻观察到细线偏离竖直方向θ角,则此刻小车对物块B产生的作用力的大小和方向为( )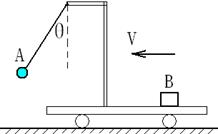
A.mg ,斜向右上方 ,斜向右上方 |
B.mg ,斜向左上方 ,斜向左上方 |
| C.mgtanθ,水平向右 | D.mg,竖直向上 |
一物体沿固定斜面从静止开始向下运动,经过时间t0滑至斜面底端.已知物体在运动过程中所受的摩擦力恒定.若用F、v、s和E分别表示该物体所受的合外力、物体的速度、位移和机械能,则下列图象中可能正确的是 ( ) 
 粤公网安备 44130202000953号
粤公网安备 44130202000953号