传感器和计算机结合,可以快速测量和记录变化的力。如图,传感器和计算机连接, 弹性细绳一端系小球,另一端与传感器连接,把小球举到O点,放手让小球自由下落,获得弹性细绳中拉力F随时间变化的图线。不计空气阻力。根据图线可以判断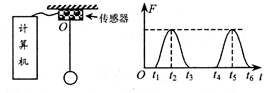
| A.2t1= (t4-t3) |
| B.从t2~t3,小球的速度一直增大 |
C.细绳的自然长度是 |
| D.t5时刻小球处在最低点 |
相关试题
如图所示为电阻R1和R2的伏安特性曲线,并且把第一象限分为了Ⅰ、Ⅱ、Ⅲ三个区域.现把R1和R2并联在电路中,消耗的电功率分别用P1和P2表示;并联的总电阻设为R.下列关于P1与P2的大小关系及R的伏安特性曲线应该在的区域正确的是()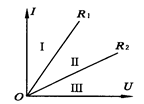
| A.特性曲线在Ⅰ区,P1<P2 |
| B.特性曲线在Ⅲ区,P1<P2 |
| C.特性曲线在Ⅰ区,P1>P2 |
| D.特性曲线在Ⅲ区,P1>P2 |
如图所示,图中的四个电表均为理想电表,当滑动变阻器滑动触点P向右端移动时,下面说法中正确是()
| A.伏特表V1的读数减小,安培表A1的读数减小 |
| B.伏特表V1的读数增大,安培表A1的读数增大 |
| C.伏特表V2的读数减小,安培表A2的读数增大 |
| D.伏特表V2的读数增大,安培表A2的读数减小 |
在如图所示的电路中,R1为定值电阻,R2为可变电阻,E为电源电动势,r为电源内阻.则以下说法中正确的是()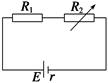
| A.当R2=R1+r时,R2上获得最大功率 |
| B.当R1=R2+r时,R1上获得最大功率 |
| C.当R2=0时, 电源的输出功率最大 |
| D.以上说法都不正确 |
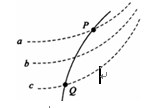
如图所示, 倾角为θ的绝缘斜面固定在水平面上,当质量为m、带电荷量为+q的滑块沿斜面匀速下滑时,在此空间突然加上竖直方向的匀强电场,已知滑块受到的电场力小于滑块的重力.则()
| A.加上竖直向上的电场后,滑块将减速下滑 |
| B.加上竖直向下的电场后,滑块仍匀速下滑 |
| C.加上竖直向上的电场后,滑块仍匀速下滑 |
| D.加上竖直向下的电场后,滑块将加速下滑 |
 粤公网安备 44130202000953号
粤公网安备 44130202000953号