霍尔式位移传感器的测量原理如图所示,有一个沿z轴方向均匀变化的匀强磁场,磁感应强度B=B0+kz(B0、k均为常数)。将霍尔元件固定在物体上,保持通过霍尔元件的电流I不变(方向如图9所示),当物体沿z轴正方向平移时,由于位置不同,霍尔元件在y轴方向的上、下表面的电势差U也不同。则 ( )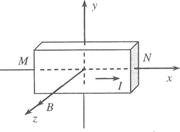
| A.磁感应强度B越大,上、下表面的电势差U越大 |
B.k越大,传感器灵敏度( )越高 )越高 |
| C.若图中霍尔元件是电子导电,则下板电势高 |
| D.电流越大,上、下表面的电势差U越小 |
相关试题
两个质点A、B放在同一水平面上,由静止开始从同一位置沿相同方向同时开始做直线运动,其运动的v – t图象如图所示。对A、B运动情况的分析,下列结论正确的是()
A.A、B加速时的加速度大小之比为 ,A、B减速时的加速度大小之比为
,A、B减速时的加速度大小之比为
B.在t =" 3" t0时刻,A、B相距最远
C.在t =" 5" t0时刻,A、B相距最远
D.在t =" 6" t0时刻,A、B相遇
如图所示,质量为M、半径为R的半球形物体A放在水平地面上,通过最高点处的钉子用水平轻质细线拉住一质量为m、半径为r的光滑球B,A、B均静止。则()
A.B对A的压力大小为
B.细线对小球的拉力大小为
C.A对地面的压力大小为(M + m)g
D.地面对A有水平向左的摩擦力
如图所示,用水平方向的力F将重为G的木块压在竖直的墙壁上,开始时木块保持静止,下列判断中正确的是()
| A.当F增大时,摩擦力将增大 |
| B.当F减小时,摩擦力一定减小 |
| C.当F减小时,摩擦力先不变,后变小 |
| D.当F减小为零时,摩擦力不一定为零 |
关于力与运动的关系,下列说法中正确的是()
| A.物体在恒力的作用下一定做直线运动 |
| B.物体在变力的作用下一定做曲线运动 |
| C.物体在恒力的作用下可能做匀速圆周运动 |
| D.物体在变力的作用下可能做曲线运动 |
相关知识点
 粤公网安备 44130202000953号
粤公网安备 44130202000953号