如图所示,将一根不能伸长、柔软的轻绳两端分别系于A、B两点上,一物体用动滑轮悬挂在绳子上,达到平衡时,两段绳子间的夹角为θ1,绳子张力为F1;将绳子B端移至C点,待整个系统达到平衡时,两段绳子间的夹角为θ2,绳子张力为F2;将绳子B端移至D点,待整个系统达到平衡时,两段绳子间的夹角为θ3,绳子张力为F3,不计摩擦,则
A.θ1=θ2=θ3 B.θ1=θ2<θ3 C.F1>F2>F3 D.F1=F2<F3
相关试题
如图所示,电源电动势为E,内阻为r,不计电压表和电流表内阻对电路的影响,当电键闭合后,两小灯泡均能发光,在将滑动变阻器的触片逐渐向右滑动的过程中,下更说法正确的是()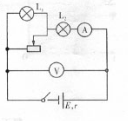
| A.小灯泡L1、L2均变暗 |
| B.小灯泡L1变亮,小灯泡L2变暗 |
| C.电流表A的读数变小,电压表V的读数变大 |
| D.电流表A的读数变大,电压表V的读数变小 |
空间某区域内存在着电场,电场线在竖直平面上的分布如图所示,一个质量为m、电荷量为q的小球在该电场中运动,小球经过A点时的速度大小为v1,方向水平向右,运动至B点时的速度大小为v2,运动方向与水平方向之间的夹角为 ,A、B两点之间的高度差与水平距离均为H,则以下判断中正确的是()
,A、B两点之间的高度差与水平距离均为H,则以下判断中正确的是()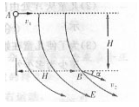
A.若v2>v1,则电场力一定做正功
B.A、B两点间的电势差
C.小球运动到B点时所受重力的瞬时功率
D.小球由A点运动到B点,电场力做的功
竖直放置的平行金属板A、B加一恒定电压,两个电荷M和N以相同的速率分别从极板A边缘和两板中间沿竖直方向进入板间电场,恰好从极板B边缘射出电场,如图所示,不考虑电荷的重力和它们之间的相互作用,下列说法正确的是()
A.两电荷在电场中运动的时间相等
B.两电荷在电场中运动的加速度相等
C.两电荷的比荷相等
D.两电荷的带电性质不同

 粤公网安备 44130202000953号
粤公网安备 44130202000953号