如图所示的交流电路中,理想变压器输入电压为 ,输入功率为
,输入功率为 ,输出功率为
,输出功率为 ,各交流电表均为理想电表.当滑动变阻器R的滑动头向下移动时( )
,各交流电表均为理想电表.当滑动变阻器R的滑动头向下移动时( )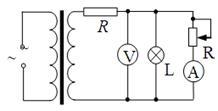
| A.灯L变亮 |
| B.各个电表读数均变大 |
| C.因为不变,所以不变 |
D.变大,且始终有 |
相关试题
一个面积S=4×10-2 m2、匝数n=100匝的线圈,放在匀强磁场中,磁场方向垂直于线圈平面,磁感应强度B随时间t变化的规律如图所示,0时刻磁感应强度B垂直线圈平面向里,则下列判断正确的是
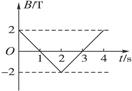
| A.t=1s时线圈中的电流方向发生变化 |
| B.在开始的2 s内穿过线圈的磁通量的变化量等于零 |
| C.1-2s内线圈中电流方向为顺时针方向 |
| D.在第3 s末线圈中的感应电动势等于零 |
如图所示,粗糙水平桌面上有一质量为m的铜质矩形线圈.当一竖直放置的条形磁铁从线圈中线AB正上方等高快速经过时,若线圈始终不动,则关于线圈受到的支持力FN及在水平方向运动趋势的正确判断是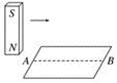
| A.FN先小于mg后大于mg,运动趋势向左 |
| B.FN先大于mg后小于mg,运动趋势向左 |
| C.FN先大于mg后小于mg,运动趋势向右 |
| D.FN先小于mg后大于mg,运动趋势向右 |
1831年法拉第把两个线圈绕在一个铁环上,A线圈与电源、滑动变阻器R组成一个回路,B线圈与开关S,电流表G组成另一个回路。如图所示,通过多次实验,法拉第终于总结出产生感应电流的条件。关于该实验下列说法正确的是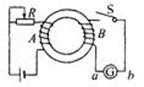
A.闭合开关S的瞬间,电流表G中有 的感应电流 的感应电流 |
B.闭合开关S的瞬间,电流表G中有 的感应电流 的感应电流 |
| C.闭合开关S后,在增大电阻R的过程中,电流表G中有的感应电流 |
| D.闭合开关S后,在增大电阻R的过程中,电流表G中有的感应电流 |
如图所示,半径为R的n匝线圈套在边长为a的正方形abcd之外,匀强磁场垂直穿过该正方形,当磁场以 的变化率变化时,线圈产生的感应电动势的大小为
的变化率变化时,线圈产生的感应电动势的大小为
A. |
B. |
C. |
D. |

相关知识点
 粤公网安备 44130202000953号
粤公网安备 44130202000953号