将力传感器A固定在光滑水平桌面上,测力端通过轻质水平细绳与滑块相连,滑块放在较长的小车上。如图甲所示,传感器与计算机相连接,可获得力随时间变化的规律。一水平轻质细绳跨过光滑的定滑轮,一端连接小车,另一端系沙桶,整个装置开始处于静止状态。在物体与小车分离前缓慢向沙桶里倒入细沙,力传感器采集的F-t图象如乙图所示。则
| A.2.5s前小车做变加速运动 | B.2.5s后小车做变加速运动 |
| C.2.5s前小车所受摩擦力不变 | D.2.5s后小车所受摩擦力不变 |
相关试题
要使真空中的两个点电荷间的库仑力增大到原来的4倍,下列方法中可行的是:()
每个点电荷的带电量都增大到原来的4倍,电荷间 的距离不变
保持点电荷的带电量不变,使两个电荷间的距离增大到原来的2 倍
使一个点电荷的电荷量加倍,另一个点电荷的电荷量保持不变,同时将两个点电荷间的距离减小为原来的1/2
D、保持点电荷的电荷量不变,将两个点电荷的距离减小到原来的1/2
关于库仑定律的公式 ,下列说法中正确的是:()
,下列说法中正确的是:()
当真空中的两个点电荷间的距离r→∞时,它们之间的静电力F→∞
当真空中的两个点电荷间的距离r→0时,它们之间的静电力F→∞
当两个点电荷之间的距离r→∞时,库仑定律的公式就不适用了
D、当两个点电荷之间的距离r→0时,电荷不能看成是点电荷,库仑定律的公式就不适用了
如图所示,当带正电的球C移近不带电的枕形金属导体时,枕形导体上的电荷移动情况是:()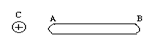
| A.枕形金属导体上的正电荷向B端移动,负电荷不移动 |
| B.枕形金属导体上的带负电的电子向A端移动,正电荷不移动 |
| C.枕形金属导体上的正、负电荷同时分别向B端和A端移动 |
| D.枕形金属导体上的正、负电荷同时分别向A端和B端移动 |
 粤公网安备 44130202000953号
粤公网安备 44130202000953号