如图所示的电路中,电源电压6V保持不变,闭合开关S,电压表示数为4V,电流表示数为0.4A;
求:(1) R2两端的电压;
(2) R1、R2的阻值;
(3)电路中的总电阻。
相关试题
如图所示,电源电压保持不变,电阻R1的阻值为20Ω。当滑片P在滑动变阻器的B端时,电压表的示数为3V;当滑片在滑动变阻器的中点C时,电压表的示数为2V。求:(1)电路两端的电压U;(2)滑动变阻器的最大阻值RAB。(要求每个状态分别画出对应的电路图)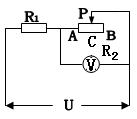
 数为2V。
数为2V。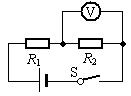
推荐套卷
如图所示的电路中,电源电压6V保持不变,闭合开关S,电压表示数为4V,电流表示数为0.4A;
求:(1) R2两端的电压;
(2) R1、R2的阻值;
(3)电路中的总电阻。
如图所示,电源电压保持不变,电阻R1的阻值为20Ω。当滑片P在滑动变阻器的B端时,电压表的示数为3V;当滑片在滑动变阻器的中点C时,电压表的示数为2V。求:(1)电路两端的电压U;(2)滑动变阻器的最大阻值RAB。(要求每个状态分别画出对应的电路图)
 粤公网安备 44130202000953号
粤公网安备 44130202000953号