阅读探究:
世界上第一个测出大气压值的物理学家是意大利的托里拆利。他取一根长约1米,一端封闭,一端开口的细长玻璃管。然后他将玻璃管中注满水银,再将玻璃管倒插在水银槽中,这时会发现管中水银没有全部流到水银槽中。他就得出:管中水银产生的压强就等于外面的大气压强。这就是著名的托里拆利实验。
(1)在此实验中,若将玻璃管稍作倾斜,则管中水银柱的高度将如何变化?
(2)在实验中为什么要在玻璃管中注满水银?若有空气混在里面对实验结果有什么影响?
(3)若管内外的水银面的高度差为76cm,则此时的大气压的值为多少帕?
通过学习物理知识小明知道气体、液体、和固体都是由分子组成的,小明产生了浓厚的学习兴趣,在老师的帮助下,他做了如下的探究活动: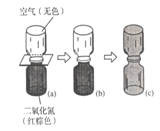
(1)如图所示,把装有空气的瓶子倒放在装有红棕色二氧化氮气体的瓶子上,中间用玻璃片隔开;抽掉中间的玻璃片(b图、c图),仔细观察,会看到比空气密度大的二氧化氮,竟能运动到上面的瓶子里,而上面瓶子里面的空气也能运动到下面的瓶子里,最终两个瓶子中的气体的颜色就变得一样了.
对于这个现象,小明提出了自己的猜想: __________________.
(2)为了证明自己的猜想,小明接着做实验探究:如图所示,
先在量筒中盛半量筒水,再把蓝色的硫酸铜溶液(密度比水大)小心的倒入量筒底部.经过一段时间后,水和硫酸铜的分界面由模糊而逐渐消失,两种溶液自动混合了.这个实验同样可以说明_________________________ .
.
(3)做了气体、液体的实验后小明又做了固体的实验,但连续做几个实验都观察不到明显的现象,后来偶然在一篇科普文章中,小明看到了下面一段文字:有人用固体做实验,将磨得很光滑的铅片和金片紧压在一起,在室温下过了5年,铅片和金片就结合在一起了,切开后发现铅和金相互渗透了约1毫米深.
这段文字表明了______________________________.
小明欣喜万分,他把以上三次结论进行了总结,这个总结应是:
______________________________________________________________________.
.如图所示,是伽利略著名的理想斜面实验,实验设想的步骤有:
①减小第二个斜面的倾角,小球在该斜面上仍然要达到原来的高度。
②两个对接的斜面,让静止的小球沿一个斜面滚下,小球将滚上另一个斜面。
③继续减小第二个斜面的倾角,最后使它成水平面,小球将沿水平面作持续的匀速运动。
④如果没有摩擦,小球将上升到原来释放时的高度。
(1)请将上述步骤按照正确的顺序排列(只要填写序号).
(2)在上述设想步骤中,有的属于可靠事实,有的则是理想化的推论。下面关于这些事实和推论的分类正确的是()
A.① 是事实,② ③ ④ 是推论
B.② 是事实,① ③ ④ 是推论
C.③ 是事实,① ② ④ 是推论
D.④ 是事实,① ② ③ 是推论
.如图是奥运“福娃”将足球踢出去的情景。
 |
福娃在比赛中,踢出了“直线球”与“香蕉球”,这两种球的运动轨迹和旋转情况各不相同,这主要是由于踢球时所用力的和不同,从而产生了不同的作用效果;
(2)除了上面两点知识外,这里还蕴含着其它物理知识,请你再写出两点:①;②。
.在“探究二力平衡的条件”实验中,小明选择了如图的装置,把小卡片两端细线绕过滑轮,并挂上钩码。
(1)实验中选择小卡片的目的是(填“考虑”、“不考虑”)小卡片的重力;探究两个力大小关系时,应该观察细线两端所挂钩码的个数。
(2)旋转小卡片,松手后观察小卡片是否平衡,这是为了探究两个平衡力的哪一个条件。
(3)小明利用弹簧测力计代替图中的钩码进行了探究,发现两个力的大小还有较小的差距.你认为形成差距的原因是(答出一条即可)。

 粤公网安备 44130202000953号
粤公网安备 44130202000953号