相关试题
如图所示,A、B、C是匀强电场中的等腰直角三角形的三个顶点,AB=BC=10cm.已知A、B、C三点的电势分别为15V,6V,-3V。场强的大小为___________V/m,方向_______________。(结果可以用根式表示)
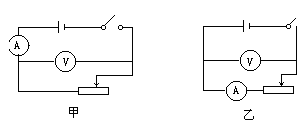
如图所示为研究平行板电容器电容的实验,极板B与一灵敏的静电计相连,极板A和静电计的外壳均接地,充电后断开电源。若只将极板A向右稍微移动一些,静电计指针偏角将_______;若只将极板A竖直向上移动一些,静电计指针偏角将______.(填变小、不变或变大)
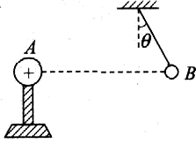
如图所示,一个挂在绝缘丝线下端的带正电的小球B(可看成质点),静止在图示位置;若固定的带正电的小球A(可看成质点)电荷量为Q,B球的质量为m。当A、B两球之间的距离为 时,θ=37°,A和B在同一水平线上(整个装置处于真空中),则B带_______电(填电性),电荷量为_________________.(已知重力加速度为g,静电力常量为k,
时,θ=37°,A和B在同一水平线上(整个装置处于真空中),则B带_______电(填电性),电荷量为_________________.(已知重力加速度为g,静电力常量为k,  )
)
 粤公网安备 44130202000953号
粤公网安备 44130202000953号