如图所示,一质量M=2.0kg的长木板AB静止在水平面上,木板的左侧固定一半径R=0.60m的四分之一圆弧形轨道,轨道末端的切线水平,轨道与木板靠在一起,且末端高度与木板高度相同。现在将质量m=l.0kg的小铁块(可视为质点)从弧形轨道顶端由静止释放,小铁块到达轨道底端时的速度v0=3.0m/s,最终小铁块和长木板达到共同速度。忽略长木板与地面间的摩擦。取重力加速度g=l0m/s2。求
①小铁块在弧形轨道上滑动过程中克服摩擦力所做的功Wf;
②小铁块和长木板达到的共同速度v。
如图甲所示,光滑且足够长的平行金属导轨MN、PQ固定在同一水平面上,两导轨间距L=0.30 m.导轨电阻忽略不计,其间连接有固定电阻R=0.40 Ω.导轨上停放一质量m=0.10 kg、电阻r=0.20 Ω的金属杆ab,整个装置处于磁感应强度B=0.50 T的匀强磁场中,磁场方向竖直向下.用一外力F沿水平方向拉金属杆ab,使之由静止开始运动,电压传感器可将R两端的电压U即时采集并输入电脑,获得电压U随时间t变化的关系如图乙所示.
(1)利用上述条件证明金属杆做匀加速直线运动,并计算加速度的大小;
(2)求第2 s末外力F的瞬时功率;
(3)如果水平外力从静止开始拉动杆2 s所做的功W=0.35 J,求金属杆上产生的焦耳热.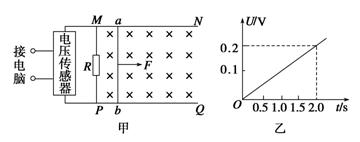
如图甲所示,宽度为d的竖直狭长区域内(边界为L1、L2),存在垂直纸面向里的匀强磁场和竖直方向上的周期性变化的电场(如图7乙所示),电场强度的大小为E0,E>0表示电场方向竖直向上.t=0时,一带正电、质量为m的尘埃从左边界上的N1点以水平速度v射入该区域,沿直线运动到Q点后,做一次完整的圆周运动,再沿直线运动到右边界上的N2点.Q为线段N1N2的中点,重力加速度为g.上述d、E0、m、v、g为已知量.
(1)求微粒所带电荷量q和磁感应强度B的大小;
(2)求电场变化的周期T;
(3)改变宽度d,使微粒仍能按上述运动过程通过相应宽度的区域,求T的最小值.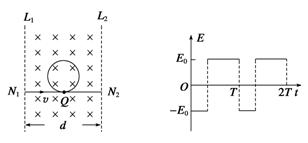
如图15所示,水平桌面上有一轻弹簧,左端固定在A点,弹簧处于自然状态时其右端位于B点.水平桌面右侧有一竖直放置的光滑圆弧形轨道MNP,其半径R=0.8 m,OM为水平半径,ON为竖直半径,P点到桌面的竖直距离也是R,∠PON=45°第一次用质量m1=1.1 kg的物块(可视为质点)将弹簧缓慢压缩到C点,释放后物块停在B点(B点为弹簧原长位置),第二次用同种材料、质量为m2=0.1 kg的物块将弹簧也缓慢压缩到C点释放,物块过B点后做匀减速直线运动,其位移与时间的关系为 ,物块从桌面右边缘D点飞离桌面后,由P点沿圆轨道切线落入圆轨道.(g=10 m/s2,不计空气阻力)
,物块从桌面右边缘D点飞离桌面后,由P点沿圆轨道切线落入圆轨道.(g=10 m/s2,不计空气阻力)
求:(1)BC间的距离;
(2)m2由B运动到D所用时间;
(3)物块m2运动到M点时,m2对轨道的压力.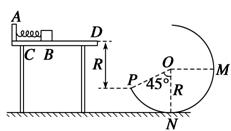
 ,方向水平。释放后火箭立即向后以相对于地面的速率u喷出质量为m的燃气,火箭相对于地面的速度变为多大?
,方向水平。释放后火箭立即向后以相对于地面的速率u喷出质量为m的燃气,火箭相对于地面的速度变为多大?
 ABC的折射率,用一束激光沿平行于BC边的方向射向直角边AB边,如图所示。激光束进入棱镜后射到另直角边AC边时,刚好能发生全反射。该棱镜的折射率为多少?
ABC的折射率,用一束激光沿平行于BC边的方向射向直角边AB边,如图所示。激光束进入棱镜后射到另直角边AC边时,刚好能发生全反射。该棱镜的折射率为多少?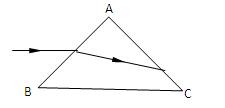
 粤公网安备 44130202000953号
粤公网安备 44130202000953号