光电鼠标在电脑中应用非常广泛,其原理就是利用发光二极管照射鼠标垫(如图所示),并被反射到鼠标内的光学感应器.当鼠标移动时,感应器会连续拍摄鼠标垫表面所成的像,并利用数字信号处理来比较各个影像,以确定移动的距离和方向.产生的结果会传回计算机,而屏幕上的光标会根据这些结果来移动,图中光学感应器、透镜、发光二极管等元件固定在鼠标内.当发光二极管的光照射在粗糙的鼠标垫上时会发生_________(填“镜面反射”或“漫反射”).光学感应器上所成的像是________(填“实像”或“虚像”).
相关试题
如图所示,杠杆每小格的长度相等,质量不计,以O为支点.杠杆的左端挂有物体M,支点右边的A处挂钩码,杠杆平衡.若将支点移到B点,要使杠杆重新平衡,在A点应挂 个相同的钩码。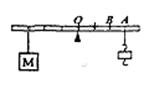


在如图所示的实验装置中: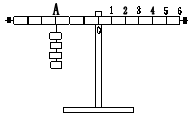
①实验前没有挂钩码时,发现杠杆左端下倾,应将杠杆右端螺母向_______(左或右)边旋一些,使杠杆在水平位置平衡。
②实验时只有8个相同的钩码,杠杆上每格等距,当在A点挂4个钩码时,则怎样挂钩码可以使杠杆在水平位置平衡?
(请设计两种方案)
答:①_______________________________
②__________________________ __。
 .若在杠杆左端钩码下方增加一个相同的钩码,重新调节弹簧秤对杠杆右端拉力的方向后,使杠杆AB再次恢复水平平衡,则这时弹簧秤的拉力与对应力臂的乘积应是未增加钩码前弹簧秤的拉力与对应力臂乘积的____倍.
.若在杠杆左端钩码下方增加一个相同的钩码,重新调节弹簧秤对杠杆右端拉力的方向后,使杠杆AB再次恢复水平平衡,则这时弹簧秤的拉力与对应力臂的乘积应是未增加钩码前弹簧秤的拉力与对应力臂乘积的____倍.
相关知识点
推荐套卷
 粤公网安备 44130202000953号
粤公网安备 44130202000953号