汽车是常用的交通工具,汽车的许多问题都跟物理知识有关

(1)汽车上有许多地方要利用光的反射,如图汽车中的A、B两处,A为观后镜,B为车头灯内的反射镜.A应为________,B应为________. (分别选择“平面镜”“凹面镜”“凸面镜”填在相应横线上)
小型汽车前挡风玻璃设计成倾斜的,原因之一是防止晚上车内景物通过挡风玻璃成像干扰司机视线,当成像时是挡风玻璃对光进行了 。
(2)图2是汽车司机看到的路边指示牌.在遵守交通规则的前提下,汽车抵达重庆至少还需要__________h.
某实验小组进行“探究凸透镜成像规律”的实验: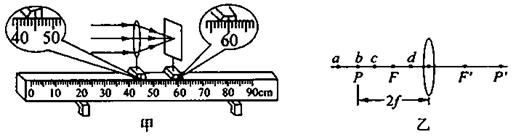
(1)由图甲可知,该凸透镜的焦距是_____________cm。
(2)实验时凸透镜与光屏的高度已调好,但烛焰在光屏上像的位置偏高,要想使像成在光屏中央,应调节蜡烛使烛焰向_____________(填 “上”或“下”)移动。
(3)如图乙所示,若在光屏上(光屏未画出)得到清晰放大的实像,则烛焰应位于透镜左侧a、b、c、d四点中的___________点,此成像规律应用在____________上(填一种器材名称)。
(4)若遮住凸透镜的下半部分,则烛焰在光屏上的成像情况时 _______(选填“完整的像”、“一半的像”或“无法成像”)。
(5)若把图中的凸透镜看作眼睛的晶状体,光屏看作视网膜,当“眼睛”戴上近视眼镜时,烛焰刚好在“视网膜”上成一清晰的像;若取下近视眼镜,则清晰的像会成在“视网膜”的__________(“前面”或“后面”)
现在实验室有调节好的托盘天平一架(带砝码),平底试管一个,足量的沙子,小勺一把,符合要求的量筒中装有适量的水等器材。请你设计实验证明:“平底试管在水中漂浮时所受的浮力跟它排开水的体积成正比”。
要求:⑴写出主要实验步骤;
⑵设计实验记录表格。
小明在学习电学知识时用图所示电路进行探究学习。他首先在图中a、b两点间接入一个电阻,然后又在a、b两点间串联接入两个电阻,并依此方式串联接入不同数目的电阻分别进行实验。他观察发现,每多接入一个电阻,电流表的示数就减小一些,于是他得出结论,在任何情况下,电路中接入的电阻数目越多,电流越小。请你利用图所示的实验器材及一些定值电阻,设计一个实验说明小明的结论是错误的。
(1)在图中a、b两点间补充完成你所设计的实验电路图。
(2)简述实验步骤和实验现象。
小林利用定值电阻R进行实验,记录的实验数据如下表所示。表中U为电阻R两端的电压,P为电阻R的电功率。请根据表中数据归纳电功率P与电压U的关系:在的条件下,P =。
| U/A |
6 |
9 |
12 |
15 |
18 |
21 |
| P/W |
1.2 |
2. 7 |
4.8 |
7.5 |
10.8 |
14.7 |

 粤公网安备 44130202000953号
粤公网安备 44130202000953号