随着航天技术的发展,许多实验可以搬到太空中进行.飞船绕地球做匀速圆周运动时,无法用天平称量物体的质量.假设某宇航员在这种环境下设计了如图所示装置(图中O为光滑的小孔)来间接测量物体的质量:给待测物体一个初速度,使它在桌面上做匀速圆周运动.设飞船中具有基本测量工具.
物体与桌面间的摩擦力可以忽略不计,原因是________ __________
实验时需要测量的物理量是弹簧秤示数F、圆周运动的周期T
和________________待测物体质量的表达式为___________
相关试题
某物理兴趣学习小组在探究轻杆的弹力特点时,涉及到如图(下左)所示的装置,装置中水平横梁的一端A插在墙壁内,另一端装有一个小滑轮B,轻绳的一端C固定于墙壁上,另一端跨过滑轮后悬挂一个质量m=20kg的重物.经过测量已知∠CBA=30°,则BC绳上的拉力为.B处的滑轮受到绳子的作用力应该为.(g取10m/s2) 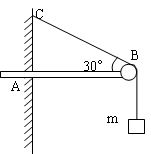
质量为50kg的物体放在水平地面上用100N水平推力刚能使物体匀速前进,则物体与水平地面间的动摩擦因数为,若用200N的水平推力推物体时,物体运动的加速度大小为.( g取10m/s2)
如图所示有一正方形线框边长为0.4m , 线框平面和匀强磁场的磁感线夹角为30°, 现已知线框内磁通量为0.2Wb , 则磁场的磁感应强度为B=____T.当线框平面以O为轴逆时针旋转30°时,线框内磁通量的变化量为△Φ=________Wb.当线框平面由初始位置逆时针旋转180°时,线框内磁通量的变化量为△Φ’=______Wb.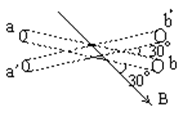
如图所示,电子射线管(A为其阴极),放在蹄形磁轶的N、S两极间,射线管的AB两极分别接在直流高压电源的极和极。磁时,荧光屏上的电子束运动径迹偏转。(填“向上”、“向下”“不”)。 

 粤公网安备 44130202000953号
粤公网安备 44130202000953号