用计算机辅助实验系统做验证牛顿第三定律的实验∶用一辆电玩具汽车拖运另一辆无动力的玩具汽车,在两车挂接处装上传感器探头,并把它们的挂钩连在一起. 当电玩具汽车通电后拉着另一辆车向前运动时,可以在显示器屏幕上呈现相互作用力随时间变化的图像,如图所示. 观察分析两个力传感器的相互作用力随时间变化的曲线,可以得出以下实验结论,其中正确的是( )
| A.作用力与反作用力的大小时刻相等 |
| B.作用力与反作用力作用在同一物体上 |
| C.作用力与反作用力大小相等,方向相反 |
| D.作用力与反作用力方向相同 |
相关试题




关于相互作用,下列说法正确的是:
| A.在相对静止的时候,互相接触的物体之间不可能产生摩擦力 |
| B.维持月球绕地球运动的力与使苹果下落的力是不同性质的力 |
| C.在微观带电粒子的相互作用中,万有引力比库仑力强得多 |
| D.由于强相互作用的存在,尽管带正电的质子之间存在斥力,但原子核仍能紧密的保持在一起 |
一单色光照到某金属表面时,有光电子从金属表面逸出,下列说法中正确的是(填入正确选项前的字母。选对1个给3分,选对2个给4分,选对3个给6分;每选错1个扣3分,最低得分为0分).
| A.无论增大入射光的频率还是增加入射光的强度,金属的逸出功都不变 |
| B.只延长入射光照射时间,光电子的最大初动能将增加 |
| C.只增大入射光的频率,光电子的最大初动能将增大 |
| D.只增大入射光的频率,光电子逸出所经历的时间将缩短 |
E.只增大入射光的强度,单位时间内逸出的光电子数目将增多
频率不同的两束单色光1和2 以相同的入射角从同一点射入一厚玻璃板后,其光路如图所示,下列说法正确的是__________(填入正确选项前的字母.选对1个给3分,选对2个给4分,选对3个给6分.每错1个扣3分,最低得分为0分)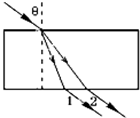
| A.单色光1的频率大于单色光2的频率 |
| B.在玻璃中单色光1的传播速度大于单色光2 的传播速度 |
| C.可能单色光1是红色,单色光2是蓝色 |
| D.无论怎样增大入射角,单色光1和2都不可能在此玻璃板下表面发生全反射 |
E.若让两束光从同种玻璃射向空气,单色光1从玻璃到空气的全反射临界角小于单色光2从玻璃到空气的全反射临界角
 粤公网安备 44130202000953号
粤公网安备 44130202000953号