如图是某同学设计的电容式位移传感器原理图,其中右板为固定极板,左板为可动 极板,待测物体固定在可动极板上。若两极板所带电荷量Q恒定,极板两端电压U将随待测物体的左右移动而变化,若U随时间t的变化关系为U=at+b(a、b为大于零的常数),其图象如图2所示,那么图3、图4中反映极板间场强大小E和物体位移s随时间t变化的图线是(设t=0时物体位移为零) ( )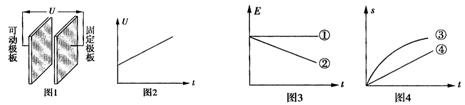
| A.①和③ | B.②和④ | C.②和③ | D.①和④ |
相关试题
某静电场中的电场线为图示实线,带电粒子仅受电场力作用由M点运动到N点,其运动轨迹如图中虚线所示,以下说法正确的是()
| A.粒子带正电荷 |
| B.由于M点没有电场线,粒子在M点不受电场力的作用 |
| C.粒子在M点的加速度小于它在N点的加速度 |
| D.粒子在M点的动能小于在N点的动能 |
一个电子在电场中的A点具有80 eV的电势能,当它由A点运动到B点时克服静电力做功30 eV,则()
| A.电子在B点时的电势能是50 eV |
| B.由A点到B点电子的电势能增加了30 eV |
| C.B点电势比A点电势高110 V |
| D.B点电势比A点电势低30V |
汽车电动机启动时车灯会瞬时变暗.如图所示,在打开车灯的情况下,电动机未启动时电流表读数为10A,电动机启动时电流表读数为58A。若电源电动势为12.5V,内阻为0.05Ω,电流表内阻不计,则因电动机启动,车灯的电功率降低了()
A.35.8 W B.43.2 W C.48.2 W D.80 W
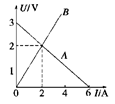
在如图所示电路中,电源内阻不可忽略,电流表、电压表均为理想电表。当滑动变阻器的滑片P由a向b端移动时()
| A.电压表示数变大,电流表示数变小 |
| B.电压表示数变大,电流表示数变大 |
| C.电压表示数变小,电流表示数变小 |
| D.电压表示数变小,电流表示数变大 |
 粤公网安备 44130202000953号
粤公网安备 44130202000953号