如图所示,一个矩形线圈abcd,已知ab为l1,ad为l2,在磁感应强度为B的匀强磁场中绕OO′轴以角速度ω(从图中位置开始)匀速转动.则线圈中感应电动势的大小为____________.
在做《研究匀变速直线运动》的实验时,某同学得到一条纸带,如图所示,并且每隔四个计时点取一个计数点,已知每两个计数点间的距离为x,且x1=0.96cm,x2=2.88cm,x3=4.80cm,x4=6.72cm,x5=8.64cm,x6=10.56cm,电磁打点计时器的电源频率为50Hz。计算打计数点4时纸带的速度大小v=___________m/s,此纸带的加速度大小a=___________m/s2。
用如右图所示的实验装置验证机械能守恒定律。实验所用的电源为学生电源,输出电压为6V的交流电(频率为 )和直流电两种。质量为0.300kg的重锤从高处由静止开始下落,重锤上拖着的纸带打出一系列的点,对纸带上的点痕进行测量,即可验证机械能守恒定律。(g取9.8m/s2)
)和直流电两种。质量为0.300kg的重锤从高处由静止开始下落,重锤上拖着的纸带打出一系列的点,对纸带上的点痕进行测量,即可验证机械能守恒定律。(g取9.8m/s2)
(1)下面列举了该实验的几个操作步骤:
| A.按照图示的装置安装器件; |
| B.将打点计时器接到电源的“直流输出”上; |
| C.释放悬挂纸带的夹子,再接通电源开关打出一条纸带; |
| D.测量纸带上某些点间的距离; |
E.根据测量的结果计算重锤下落过程中减少的重力势能是否等于增加的动能。其中操作不当的步骤是
(2)实验中得到如图所示的纸带,根据纸带可得重锤从B点到D点重力势能的减少量等于___,动能的增加量等于__________。(结果保留三位有效数)
(3)在验证机械能守恒定律的实验中发现,重锤减小的重力势能总是大于重锤动能的增加,其原因主要是___。
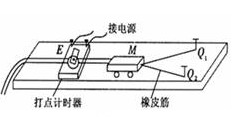
在运用下图所示装置做“探究功与速度变化的关系”的实验中,下列说法正确的是
| A.通过改变橡皮筋的条数改变拉力做功的数值 |
| B.由于本实验中的摩擦力较小,所以没必要平衡摩擦力 |
| C.通过打点计时器打下的纸带来测定小车加速的大小 |
| D.通过打点计时器打下的纸带来测定小车加速过程中获得的平均速度 |
现在用“测定玻璃的折射率”实验中的仪器来测定光在玻璃中的传播速度。实验中可提供的器材有:矩形玻璃砖、四枚大头针、木板、白纸、复写纸、图钉、刻度尺、游标卡尺、圆规。请完成以下填空和作图:
(1)从上述器材中选出实验所需的器材:。
(2)作出相应的光路图。
(3)若已知真空中的光速为c,测得玻璃的折射率为n,则光在玻璃中的传播速率 =_______。
=_______。
 粤公网安备 44130202000953号
粤公网安备 44130202000953号