轻弹簧上端与力传感器相连,下端系一质量为m的小球,静止时小球处在位置O点,在弹簧弹性限度内,让小球在竖直方向上做简谐运动,振幅为A。取O点为x坐标原点,竖直向上为x正方向;t=0时刻小球恰经过O点向上运动。传感器将其受到的弹
 |
簧作用力传给与之连接的计算机,四位同学通过计算机记录的数据分别绘制出F-t图象如下图所示,其中一定不正确的是
相关试题
关于分子间作用力,下列说法中正确的是()
| A.分子之间的距离越小,f引越小,f斥越大 |
| B.当分子间距的数量级大于10-9m时,分子力已微弱到可以忽略 |
| C.两个分子之间的距离从r<r0开始增大距离,直至相距10r0的过程中,分子力先做正功,后做负功 |
| D.碎玻璃不能拼在一起,是由于分子间距离太大,不存在作用力 |
如图所示,R1为定值电阻,R2是正温度系数的金属热电阻,L为小灯泡,当温度下降时,()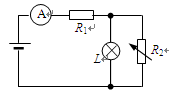
| A.R1两端的电压增大 | B.电流表的示数增大 |
| C.小灯泡变亮 | D.小灯泡变暗 |
如图所示,平行金属板间有一静止的正电粒子,若两板间加电压u=Umsinωt,设板间距离足够大,则粒子的()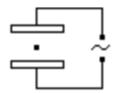
| A.位移一定按正弦规律变化 |
| B.速度一定按正弦规律变化 |
| C.加速度一定按正弦规律变化 |
| D.粒子在两板间作单向直线运动 |
 粤公网安备 44130202000953号
粤公网安备 44130202000953号